Hand dexterity remains a barrier to automation. Here's why a common benchmark could help
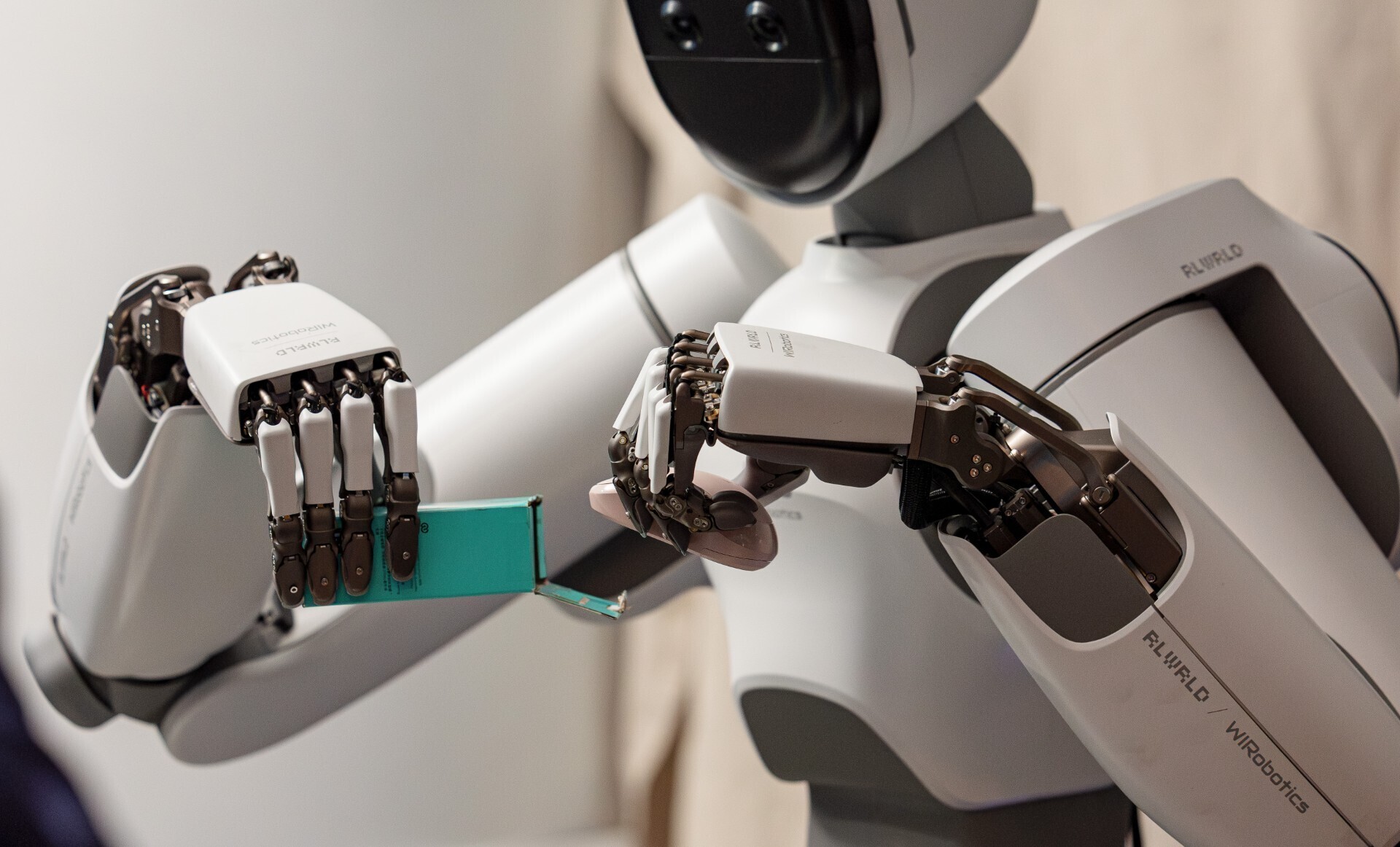
Inadequate hand dexterity remains the primary technological bottleneck. Image: RLWRLD
- Global labour shortages are driving a humanoid robot boom, but inadequate hand dexterity remains the primary technological bottleneck.
- DexBench provides a standardized framework to measure real-world robot manipulation skills across industrial environments.
- How promising ideas become scalable impact is a key focus at the World Economic Forum’s Annual Meeting of the New Champions, also known as Summer Davos, in China from 23–25 June.
The world is running short of hands. Across Korea, Japan, much of Europe, and increasingly China’s manufacturing base, the working-age population is shrinking, even as demand for physical goods and services holds steady. This is the backdrop to the defining technology story of the past two years: the global boom in humanoids and physical AI, as capital, talent and public imagination converge on a single proposition: that general-purpose robots can step into the gap demographics are opening.
The optimism is not unfounded. Locomotion is largely solved and navigation is maturing fast; robots can walk, balance and move through human spaces in ways that seemed out of reach a few years ago.
Solving the last mile of robotic automation
But anyone who has watched a robot try to fold a shirt, seat an electrical connector or pick a ripe strawberry knows where the difficulty lies. The bottleneck is not in the legs. It is in the hands. Dexterity – the fine, contact-rich manipulation people perform without conscious thought – is the part of physical work machines still struggle with most. It is, precisely, the last mile of automation. Close it, and physical AI becomes economically transformative; leave it open, and humanoids remain impressive demonstrations rather than dependable workers.
Why we need a shared standard for robotic dexterity
And here the field hits a quieter, structural problem: we have no shared way to measure dexterity. Robotics benchmarks today largely test simple actions: stacking blocks, pushing objects, picking from a bin in a controlled lab. These are useful for research but unrepresentative of the full spectrum of manipulation real industry demands. The result is a widening gap between what laboratories report and what factories can deploy, and no common instrument to even see it. The history of AI shows how such gaps close: progress follows measurement.
ImageNet catalyzed modern computer vision; MMLU and its successors shaped how we evaluate language models. A field can only improve what it can commonly measure, and without a shared standard for dexterity, the most consequential decisions in robotics are made in the dark.
Mapping robot manipulation: Object complexity and dexterity regimes
This is the gap DexBench is built to close, and it starts from the opposite end of most benchmarks. Rather than inventing tasks from a laboratory’s imagination, DexBench begins from the recurring needs of real customers across manufacturing, logistics and service operations, then works backward to the capabilities those needs demand. Two axes anchor the framework.
Object State Complexity captures how hard the manipulated object is to perceive and control: from rigid, well-defined parts at one end to deformable, variable or unpredictable materials at the other. What pushes a task towards the hard end is rarely one thing: tolerances tighten, success starts to hinge on force rather than position, contact keeps switching between gripping and slipping, the detail that matters slips out of the camera’s view, the material deforms, or events move too fast to react to. Few jobs stay fixed at one level; a single task can cross from easy to hard and back before it is finished.
Dexterity Regime captures the type and difficulty of the manipulation skill a task requires, from coarse pick-and-place to fine, force-modulated, contact-rich control. The framework distinguishes five, each defined as much by how robots fail in it as by what it demands: finding a grip that holds across varied shapes; placing contact accurately before it lands; acting at the right instant when things move or briefly vanish; sensing force to catch a slip or seat a part the camera never sees; and breaking a job into steps so a robot can recover when a first try fails.
Lifting a box off a shelf calls on one of these; seating a connector or folding clothes calls on all five. Dexterity, then, is less about how many fingers a hand has than about which of these failures it can absorb.
Together they form a coordinate system: any manipulation task can be placed as a point in shared, comparable terms, rather than described in the ad-hoc language each lab invents for itself.
Deconstructing physical work: The 18 atomic tasks of manipulation
From thousands of tasks observed across real work environments, a small and surprisingly stable structure emerges. The work decomposes into 18 key atomic tasks: the recurring primitives that appear again and again regardless of industry. Composed into roughly 80 representative cases, these cover the large majority of the manipulation performed across manufacturing, logistics, and service.
The finiteness is the point: a tractable, bounded battery of tests can stand in for an otherwise unbounded space of real-world jobs. A system’s result is not an abstract leaderboard rank but a readout of how much real work it can actually do.
That makes DexBench usable, in the same breath, by audiences that rarely speak the same language. A buyer can ask whether a given robot clears the atomic tasks their line actually depends on, before signing a purchase order. A developer can see exactly which regimes of object complexity and skill their model fails in, and target them directly. An investor can compare two companies on the same axes instead of two incomparable demo reels. The goal is not a leaderboard for its own sake, but a public yardstick that lets any builder, buyer or investor ask the same question and receive a comparable answer.
Driving industry-wide adoption for robotic standards
A benchmark’s value, in the end, comes less from being created than from being adopted. ImageNet did not matter because a single lab released it; it mattered because a community agreed to measure itself against it. DexBench will mean something only if industry players, researchers and customers take it up as a common language. Leading players across the field have begun to endorse it, including Lotte, SK Telecom, Hyosung, HL Mando, CJ Logistics, Fuji, ANA, Misui Chemicals. Also, it is designed to remain open to all.
The shortage of hands will not wait. If physical AI is to fill the gap demographics are creating, the field has to agree on what capable hands look like and how to measure them. DexBench is a starting point, not a finish line. The last mile of automation will be closed the same way it must be measured: together.
The Forum is spotlighting how innovation moves from breakthrough to scale to impact ahead of 'Summer Davos' in China, 23–25 June 2026. Follow the latest.
Don't miss any update on this topic
Create a free account and access your personalized content collection with our latest publications and analyses.
License and Republishing
World Economic Forum articles may be republished in accordance with the Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International Public License, and in accordance with our Terms of Use.
The views expressed in this article are those of the author alone and not the World Economic Forum.
Stay up to date:
Industrial Solutions and Manufacturing

Forum Stories newsletter
Bringing you weekly curated insights and analysis on the global issues that matter.